Oltre al noto flusso canalizzatore di , esiste un altro metodo per stampare a colori. Questo sistema prevede un hotend con nozzle in grado di sciogliere più di un filo e di conseguenza miscelare i vari colori.
![diamond-hotend-prints[1]](/wp-content/uploads/2016/03/diamond-hotend-prints1.jpg)
MarlinKimbra o MK4due consente l’uso anche di questo sistema vediamo come.
Innanzitutto dobbiamo sapere quanti estrusori veri monteremo sulla nostra stampante, per esempio se monteremo un Diamond Hotend dobbiamo avere tre estrusori, ma essendo quest’ultimi facenti parte di un insieme il FW lo vedrà come unico estrusore.
In Configuration_Basic.h settiamo quindi a 1 il numero di estrusori:
/***********************************************************************
************************** Extruders number ***************************
***********************************************************************/
// This defines the number of extruder real or virtual
#define EXTRUDERS 1
Ma avendo fisicamente tre motori settiamo a tre DRIVER_EXTRUDER:
// This defines the number of Driver extruder you have and use
#define DRIVER_EXTRUDERS 3
Ora apriamo il file Configuration_Feature.h e abilitiamo COLOR_MIXING_EXTRUDER:
#define COLOR_MIXING_EXTRUDER
E settiamo quanti Tools virtuali abbiamo, i tools virtuali sarebbero i nostri colori mixati, come se avessimo n fili ognuno con un colore ben definito. Per ora lasciamo a 16.
// Use the Virtual Tool method with M163 and M164
#define MIXING_VIRTUAL_TOOLS 16
Abbiamo sempre un solo hotend quindi abilitiamo sempre la voce SINGLENOZZLE:
#define SINGLENOZZLE
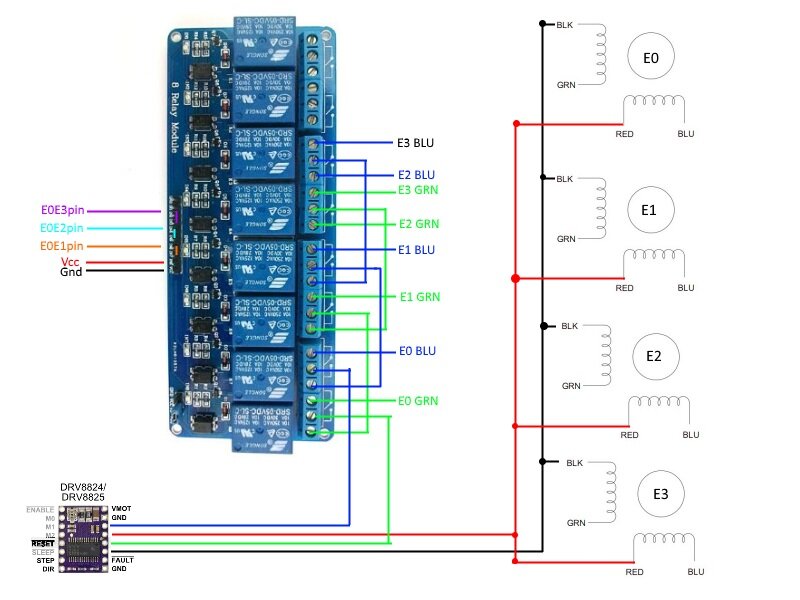
Ora il nostro firmware è pronto, è inutile dire che in questo caso a differenza degli altri sistemi, vedi MKR4, NPr2 o il Dondolo il numero dei driver per gli estrusori deve essere per forza il numero di motori che vogliamo mettere, quindi nel caso del Diamond ci servirà una scheda con 3 driver per gli estrusori, l’ con la piggy può esserci utile.
Dopo aver scaricato il FW nella nostra scheda e collegata a un host settiamo i nostri parametri. Prima di tutto dobbiamo definire i colori, questo perché per ora le informazioni non ci arrivano dagli slicer, l’unica informazione è il Tools T0 – T1 – T2 etc etc.
Immaginiamo di avere i classici tre colori Red – Green – Blu su i tre estrusori. Passiamo a creare i Tools, ne abbiamo 16 vi ricordate, virtuali.
Iniziamo a spiegare i comandi:
M163 S[index] P[mix value], con questo comando diciamo che usiamo l’estrusore[index] di un valore[mix value], il valore è un numero con la virgola compreso tra 0 e 1, dove 1 sta per il 100% e 0 per lo 0%. Per capirci il colore finale sarà composto da una percentuale di E0 + una percentuale di E1 + una percentuale di E2 e il totale deve fare 100%. Questo è dovuto al fatto che oltre a stampare di un certo colore noi cmq dobbiamo estrudere un valore fisso di materiale che deve comporre il nostro oggetto. Quindi se l’oggetto è fatto di rosso l’estrusione sarà del 100% di E0 + 0% di E1 + 0% di E2, se invece è un colore X avrà valori diversi per ogni estrusore, ma sempre il 100% di materiale deve estrudere.
Quindi creiamo il primo Tools T0, che sarà di Rosso.
M163 S0 P1 ; 100% Red
M163 S1 P0 ; 0% Green
M163 S2 P0 ; 0% Blu
Ora salviamo questa combinazione di colori nel nostro Tools T0 si usa il comando:
M164 S[index], dove l’index è il nostro Tools, quindi:
M164 S0 ; Store color mixing in tools T0
Ora creiamo il Tools Green:
M163 S0 P0 ; 0% Red
M163 S1 P1 ; 100% Green
M163 S2 P0 ; 0% Blu
E salviamolo sul Tools T1:
M164 S1 ; Store color Mixing in Tools T1
Creiamo il Tools T2 Blu:
M163 S0 P0 ; 0% Red
M163 S1 P0 ; 0% Green
M163 S2 P1 ; 100% Blu
E salviamolo sul Tools T2:
M164 S2 ; Store color Mixing in Tools T2
Creiamo un Giallo:
M163 S0 P0.5 ; 50% Red
M163 S1 P0.5 ; 50% Green
M163 S2 P0 ; 0% Blu
E salviamolo sul Tools T3:
M164 S3 ; Store color Mixing in Tools T3
Creiamo un Viola:
M163 S0 P0.5 ; 50% Red
M163 S1 P0 ; 0% Green
M163 S2 P0.5 ; 50% Blu
E salviamolo sul Tools T4:
M164 S4 ; Store color Mixing in Tools T4
Creiamo un Celeste:
M163 S0 P0 ; 0% Red
M163 S1 P0.5 ; 50% Green
M163 S2 P0.5 ; 50% Blu
E salviamolo sul Tools T5:
M164 S5 ; Store color Mixing in Tools T5
Creiamo un Arancio:
M163 S0 P0.7 ; 70% Red
M163 S1 P0.3 ; 30% Green
M163 S2 P0 ; 0% Blu
E salviamolo sul Tools T6:
M164 S6 ; Store color Mixing in Tools T6
Ora senza fare tutta la palette colori mi sembra abbastanza chiaro come definire un colore e come memorizzarlo su di un tools virtuale.
A questo punto apriamo Host e settiamo la stampante con 16 estrusori, magari mettiamo per ogni estrusore l’esatto colore che abbiamo messo nei nostri Tools cosi è più chiaro. Importiamo il nostro oggetto e settiamo per ogni parte che ci interessa un Tools (estrusore). Per farvi capire ho messo 7 pezzi di colore diverso da 1 a 7.

Facciamo lo slicing e mandiamo in stampa. A ogni cambio di Tools (estrusore) il FW non lo interpreta come un vero è proprio cambio di estrusore, ma applicherà la percentuale decisa per quel Tools ai tre estrusori. Per farvi capire se arriva un comando G1 E1, quindi estrudi 1 mm e stiamo usando il Tools T0, l’estrusore E0 estruderà 1 mm e gli altri due 0. Mentre se stiamo usando il Tools T4 (Giallo) l’estrusore E0 estruderà 0,5 mm, l’estrusore E1 0,5 mm e l’estrusore E2 0 mm, quindi sempre 1 mm di materiale uscirà dal nozzle, ma di colore giallo.
La sequenza di comandi M163 e M164 può essere aggiunta all’inizio del gcode o inserita nello start gcode in modo da poter salvare il gcode finale nella sd con gli esatti colori voluti.
Buon divertimento.
MagoKimbra.
![SainSmart-8-Channel-DC-5V-Relay-01[1]](/wp-content/uploads/2016/03/SainSmart-8-Channel-DC-5V-Relay-011-300x174.jpg)